В 1962 году в США были созданы первые два промышленные робота: робот "Юнимейт" и "Версатран". Они были предназначены для замены опасных для человека работ в литейном производстве и в химической промышленности. С этого началась роботизация всех отраслей промышленности США и во всем мире. В 1969 году в ЦНИТИ Миноборонпрома приступили к разработке первого в СССР промышленного робота "Универсал-50 и в 1971 году, через два года после этого, первые советские роботы, созданные в технологических институтах МОП и МАП были продемонстрированы на выставке в Сетуне, в результате чего началась активная роботизация отраслей промышленности СССР.
Одной из причин этого было стремление повысить производительность труда, для чего надо было вводить на заводах работу в две и три смены. Поэтому там, где рабочих не хватало, промышленные роботы успешно использовались.
В общей сложности в Советском Союзе было выпущено более 100 тыс. единиц промышленной робототехники. Они заменили более одного миллиона рабочих. Самое поразительное, что эти 100 тысяч роботов исчезли с 1992 по 1994 годы полностью. Возникает вопрос: надо ли теперь восстанавливать промышленную робототехнику? Безусловно, надо.
Прежде всего, потому, что нельзя допустить гибель промышленности России.
Но есть и другая причина. В России имеет место процесс "старения общества". Так называемая "критическая отметка" 7% , которая, согласно мировым нормам, означает, что население страны является старым, у нас была преодолена уже в 1985 году. В 1989 году она составляла 9,5%.Эти показатели являются результатами Великой отечественной войны. В 1999 году эта "критическая отметка" достигла 12,5%. Демографическая ситуация в России и ряд других причин через несколько лет приведет к непоправимому снижению притока рабочих в промышленность. Эту нехватку с успехом может восполнить не неквалифицированные иностранные работники, а промышленная робототехника.
Сегодня широкому внедрению в нашей промышленности разработанных иностранных роботов препятствует их большая стоимость по сравнению с заработной платой заменяемых рабочих. Высокая стоимость, а также недостаточная гибкость приспособления серийно выпускаемых промышленных роботов к конкретным условиям потребителей является тормозом расширения роботизации производства и в развитых промышленных странах, где почти все промышленные роботы используются лишь крупными компаниями в крупносерийном производстве. В то же время, наш, более чем 25-летний опыт разработки, производства и эксплуатации роботов показал, что наиболее целесообразно применение промышленных роботов на производстве серийной и мелкосерийной продукции как с узкой, так и с широкой и быстро меняющейся номенклатурой. Это позволило бы значительно расширить использование роботов на появляющихся сегодня мелких и средних предприятиях, то-есть многократно увеличить число продаваемых роботов.
Робототехника, как одно из средств автоматизации и замены ручного труда, развивалась по принципу принадлежности роботов тому или иному виду технологического процесса или производства, которые накладывали на конструкцию роботов свои технологические требования. Промышленные роботы, с одной стороны, должны были быть в своей технологической основе максимально универсальными для большого объема и наменклатуры выпускаемой продукции, а с другой стороны, минимально оказывали бы негативное влияние на себестоимость выпускаемой продукции в течение всего цикла ее выпуска.
Рыночная экономика, законы конкуренции привели к тому, что в мире было разработано более 270 моделей промышленных роботов. Каждая новая технология, каждая новая область применения влекла разработку новой конструкции робота, либо модернизацию существующей конструкции. Скопление на предприятии роботов различных моделей влечет за собой увеличение сервисных служб и рост финансовых затрат, что увеличивает себестоимость выпускаемой продукции и снижает прибыль. Эта проблема должна быть решена на пути максимальной модулизации конструкций промышленных роботов таким образом, чтобы все разнообразие типоразмеров роботов могло быть построено из ряда однотипных модулей с ограниченной номенклатурой размеров.
Для этого нами была проведена разработка новой концепции создания промышленных роботов антропоморфной кинематики, спрособных заменить все существующие сегодня роботы грузоподъемностью от 1,0 до 100,0 кгс с числом степеней подвижности от 2-х до 6-ти и более в любых производствах, быть основой создания сервисных и персональных роботов и стоящих на 35 -40% дешевле, чем стоят сегодня антропоморфные роботы с 5-6 степенями подвижности. Эта концепция предпологает:
- Максимальную модулизацию конструкции роботов и выбор оптимальной системы унифицированных двухкоординатных модулей для антропоморфных роботов.
- Разработку роботов на ПЭВМ под технологический процесс и индивидуальные требования заказчика.
- Максимальное снижение времени сборки, отладки и сертификации роботов.
Выполнение этого дает возможность разрабатывать и изготавливать роботы антропоморфной кинематики строго под технологию и дополнительные требования заказчика за 1,5 - 2 месяца, что снижает стоимость роботов на 35-40%. Уменьшение времени производства определяется способом разработки робота и простотой сборки из унифицированных паспортизованных модулей, являющихся для робота комлектующими изделиями.
Как показывает опыт высокоразвитых в техническом отношении стран, например опыт США, для развития производительных сил необходим непрерывный и конкурентноспособный рост обрабатывающей промышленности и машиностроения. В условиях рыночной экономики это означает, что необходимо решить три главные проблемы конкурентоспособности отечественных изделий:
КАЧЕСТВО ПРОДУКЦИИ - ВРЕМЯ СОЗДАНИЯ ПРОДУКЦИИ - ЦЕНА ПРОДУКЦИИ.
Решение этих проблем лежит на пути создания промышленных роботов с более низкой их стоимостью В свою очередь, - создание таких роботов обеспечивает выход российских разработок на мировой рынок.
Обоснованием этих утверждений является следующее:.
Промышленная робототехника, заменяя ручной труд, обеспечивает строгое выполнение технологии производства, которая определяет как временные параметры операций, так и параметры точности движений и их усилий. Это гарантирует стабильное качество продукции, которое легко контролировать автоматическими средствами, подчас - непосредственно в момент изготовления деталей. Именно эти обстоятельства породили рекламный лозунг ряда автомобильных фирм:
В то же время, одной из причин снижения качества изделий в обычном, не роботизированном производстве является присутствие человека в контуре производства (с его возможной усталостью, малым объемом внимания, субъективностью оценок ситуации, малой скоростью реакции или даже - халатностью). Ошибки людей обладают двумя непреложными свойствами:
- их невозможно исключить,
- и, в силу не формализуемого богатства человеческих ошибок, их смогут обнаружить и исправить только другие люди и только - в рамках жесткой формальной дисциплины надзора и приёмки.
Итак, - изделие, выходящее из роботизированной промышленности, является заведомо качественным изделием. И. при этом, производительность труда в такой промышленности выше (робот в составе автоматизированного производства может равномерно работать в течении трёх смен и, образно говоря, - по понедельникам у него голова не болит).
В условиях рыночной экономики в конкурентной борьбе побеждает тот, кто быстрее перестраивает производство для удовлетворения спроса рынка. Робот по своей природе является легко перепрограммируемым элементом производства. Именно это обстоятельство привело к развитию роботизации в автомобильной промышленности, где в серийном производстве ежегодно требуется смена выпускаемых моделей, а в заказном - буквально поштучная их смена. Вместе с тем, в настоящее время наиболее целесообразно применение промышленных роботов на производстве серийной и мелкосерийной продукции как с узкой, так и с широкой, но быстро меняющейся номенклатурой.
Опыт зарубежной и отечественной промышленности показывает, что только роботизированное производства способно обеспечить технологическую подготовку и переход на выпуск нового изделия за месяцы, а не за годы. В их составе используются развитые программные средства технологической подготовки и перестройки производства, связанные в единую систему с САПР конструкторских бюро, с автоматизированными складами инструментов и комплектующих наряду с роботизированными транспортными системами цеха и завода.
Выше было показано, что производительность труда в роботизированной промышленности выше, чем в промышленности, основанной на применении ручного труда. При этом облегчается и удешевляется контроль и управления качеством продукции. Известен и характер правильной организации роботизированного труда, - когда робот не заменяет рабочего, а помогает ему. При использовании робота рабочий производит много больше, зарабатывает несколько больше и устаёт меньше, чем при отсутствии робота. В этих условиях заинтересованность рабочего в роботе обеспечивает его правильную эксплуатацию.
Эти обстоятельства работают на снижение стоимости производства, и ими несколько окупается и оправдывается достаточно большая цена роботочаса, которая, как правило, выше (в наших условиях) цены часа ручного труда.
Вместе с тем платой за качество продукции и динамику перестройки производства является удорожание основных фондов за счёт стоимости средств автоматизации. Стоимость робота при этом является их заметной частью.
Проблема рентабельности робототехники не нова. Впервые она обсуждалась в 1990 году на Международном симпозиуме по робототехнике в Барселоне в рамках специально собранного для этой цели "круглого стола" практически всех мировых производителей робототехники. Обсуждался главный вопрос: что делать - промышленные роботы перестали приносить прибыль?
К этому времени во всех странах использовались роботы, спроектированные 10-15 лет до того. Благодаря инфляции в 1-2%, их рентабельность при покупке новых образцов постепенно уменьшилась. Попытки сохранить себестоимость продукции через совершенствование технологии долго не выдерживают давления инфляции. Надо искать средства дешёвого обновления производства. По мнению западных специалистов для обеспечения минимальной прибыли в настоящее время требуется снижение стоимости производства роботов на 10-12%.
Например, по имеющимся данным в США только на двух автомобильных заводах "Крайслер" и "Форд" надо заменить 4,5 тыс. промышленных роботов. При этом стоимость каждого в среднем 55тыс. долларов, стоимость сопутствующего оборудования - еще 30 тыс. долларов. Таковы общие суммы предполагаемых затрат. И если Россия сумеет предложить на рынке робот по качеству не хуже и по цене дешевле западных, то эти суммы могут инвестироваться в отечественную промышленность.
Возможно ли это? Рассмотрим проблемы "КАЧЕСТВО - ВРЕМЯ - ЦЕНА" применительно к созданию ряда отечественных промышленных роботов:
По опыту разработки промышленных роботов в СССР минимальные сроки разработки:
- создание манипулятора - 2-3 года;
- системы управления - не менее 2 лет,
- математического обеспечения:
- базового - не менее 1,5 лет,
- технологического - не менее 0.5 года.
- технологической оснастки - 0.5 года;
- управляющих программ РТК - 0.5 года.
В настоящее время можно уже за 1-1,5 года собрать из готовых комплектующих систему управления и снабдить её системным и базовым программным обеспечением, но - только при условии, что уже есть готовый робот - для отработки электроники и программ. Независимо от последнего обстоятельства сроки разработки конкретного технологического программного обеспечения и требуемых управляющих программ могут быть сокращены до полугода. Это достигается путём разработки специальных программных систем генерации базового, технологического и управляющего программного обеспечения. на разработку которых требуется поочерёдно или параллельно не менее 1 года на каждую.
Таким образом, ожидаемый срок появления первого образца робота при интенсивной и хорошо организованной работе можно сжать до 1,5 - 2 лет, если получится сократить сроки разработки механики и электромеханики манипулятора.
Заметим, что сам робот никому не нужен. Нужна его работа в составе РТК. Здесь добавляется цена технологической оснастки вместе с технологическим и управляющим программным обеспечением.
В конечном счёте цена РТК примерно пополам делится на стоимость "железа" и "программ". Средняя цена современного промышленного робота составляет не менее 50-55 тыс. долларов. Однако цена робота, изготовленного в соответствии с предлагаемой ниже технологией не будет превышать 30-35 тыс. долларов.
Требуемое качество робота и, одновременно, сокращение сроков разработки и уменьшение его цены достигаются на пути использования разработанной (см. рис.1) концепции создания промышленных роботов на базе ряда двухкоординатных модулей. Это возможно, благодаря общности свойств манипуляторов и приводов промышленных роботов разных типоразмеров.
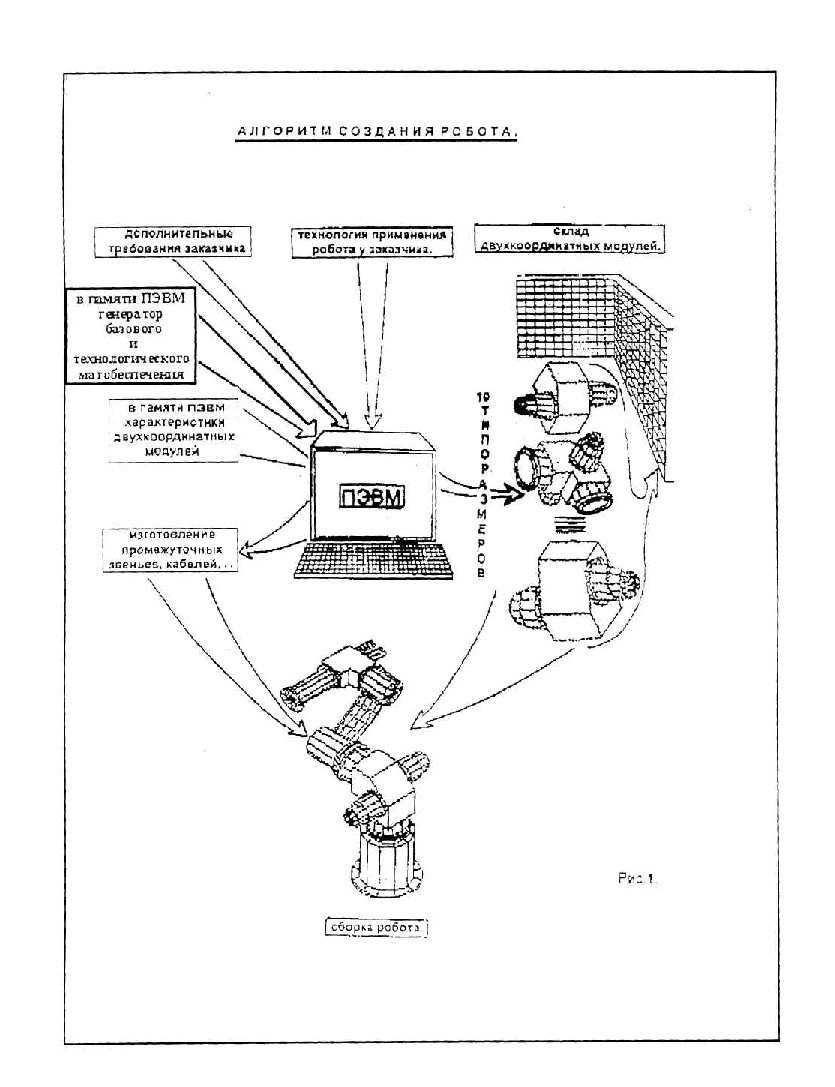
Если продолжать идти по проторенному пути, когда каждая новая технология, каждая новая область применения влекла модернизацию старой или разработку новой конструкции робота, а скопление на предприятии роботов различных моделей увеличивало сервисные службы и финансовые затраты, то заведомо будет расти себестоимость выпускаемой продукции и снижаться прибыль.
Отличительной особенностью антропоморфных промышленных роботов, составляющих большинство применяемых моделей, является наличие в манипуляторах характерных узлов сочленения (плечо, локоть, запястье) с двумя степенями подвижности. Оказывается, что конструктивно эти узлы могут быть унифицированы, и тогда они будут отличаться в пределах одного робота только весовыми и силовыми характеристиками узлов и приводов.
Отсюда и возникла идея быстрого способа создания дешевых роботов с антропоморфной кинематической схемой. Новая концепция, основанная на максимальной модулизации конструкции, заключается в создании:
- ограниченного размерного ряда двухкоординатных мехатронных модулей;
- системы автоматизированного проектирования на ПЭВМ антропоморфных промышленных роботов на основе этого ряда модулей, технологии и индивидуальных требований заказчика;
- системы автоматизированного проектирования на ПЭВМ модулей для технологического окружения робота, так и его сенсорного обеспечения датчиками и техническим зрением;
- системы автоматизированной генерации базового программного обеспечения системы управления робота, тестовых программ, средств диагностики робота и обучения персонала заказчика;
- инструментального программного обеспечения для проектирования технологической оснастки и изготовления технологических программных систем (по дополнительным требованиям заказчика).
При наличии на складе таких готовых паспортизованных двухкоординатных мехатронных модулей изготовление роботов сводится к изготовлению промежуточных звеньев, соединяющих модули. При этом конструкция модулей и промежуточных звеньев позволяет осуществлять полностью скрытую проводку энергетических и информационных коммуникаций.
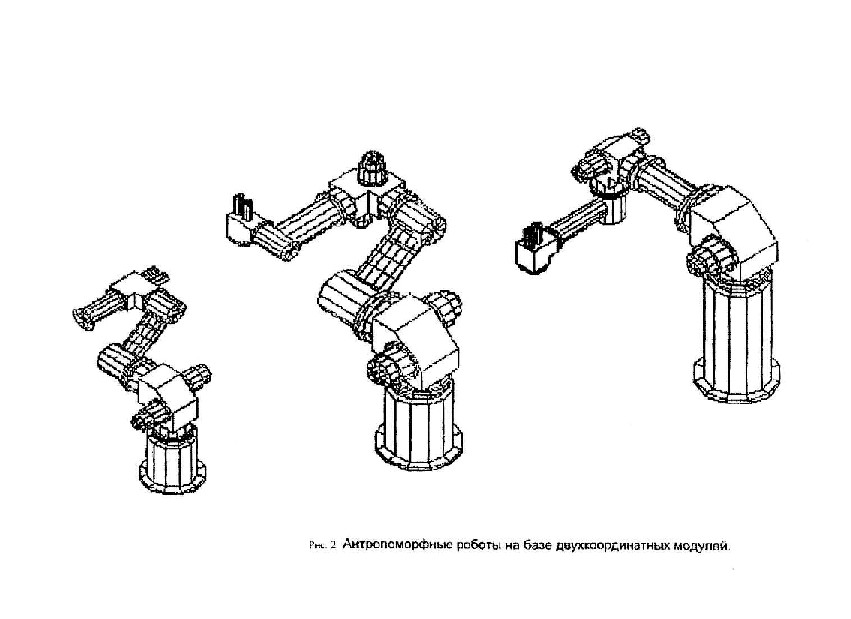
Такой подход позволяет быстро создавать антропоморфные промышленные роботы с различными кинематическими структурами грузоподъемностью от 1,0 до 100,0 кг. Примеры таких компоновок роботов показаны на рис.2. По оценкам, робот любой, в том числе и любой робот существующей компоновки из готовых паспортизованных модулей разрабатывается и изготавливается за 1,5-2 месяца, что снижает стоимость робота на 35-40%. При этом, в конструкцию системы управления робота, благодаря её модульности, закладывается возможность сопряжения его с технологической оснасткой и сенсорными системами (включая TV-камеры).
Заметим, что сегодня зарубежные фирмы-производители роботов удовлетворяют заказ потребителя через 6 месяцев, если заказанный робот полностью соответствует разработанной фирмой модели, и через 8 и более месяцев, если необходимы доработки или изменения в конструкции.
Особенностью такой технологии создания заказных роботов является и тот важный факт, что необходимое их математическое и технологическое обеспечение, индивидуальное у каждого робота, разрабатываются параллельно с разработкой робота с помощью системы автоматизированного проектирования робота, технологии и его программных средств. Имеющийся в ИПМ им. М.В.Келдыша опыт разработки программного обеспечения сборочных и сварочных роботов показывает реализуемость упомянутых выше сроков разработки.
Технико-экономический эффект, возникающий при внедрении концепции модульного построения антропоморфных промышленных роботов складывается из следующих источников:
- Значительно упрощается и удешевляется процесс создания новых роботов. Средства, вложенные в создание гаммы унифицированных модулей, возвращаются каждый раз при создании новых моделей промышленных роботов. При этом задача конструктора сводится к выпуску минимального количества монтажных чертежей и схем, руководства по эксплуатации.
- При производстве модульных промышленных роботов унифицированные приводные модули становятся объектом специализированного серийного производства, как комплектующие для промышленного робота (подобно, например, редукторам). В результате достигается снижение себестоимости, повышение качества изготовления и надежности приводных модулей.
- В процессе эксплуатации экономический эффект возникает за счет повышения ремонтопригодности, достаточно выявить неисправный модуль и заменить его на исправный), снижения затрат на обучение обслуживающего персонала и ремонтников (благодаря унификации конструкций всех модулей).
Для еще большего снижения себестоимости производимых роботов и стабилизации их качества целесообразно (и, главное, сравнительно просто) автоматизировать сборочные операции упомянутых двухкоординатных модулей с помощью тех же антропоморфных роботов, оснащенных адаптивными схватами для выполнения следующих задач:
- сборка "вал-отверстие" для модулей;
- контроль диаметров цилиндрических деталей модулей и создание селективных групп деталей для сборки модулей и отбраковки негодных деталей;
- контроль отверстий цилиндрических деталей на наличие на их поверхности локальных дефектов и отбраковки негодных деталей;
- контроль размеров и шероховатостей внутренних поверхностей деталей модулей, создание селективных групп для сборки модулей и отбраковки негодных деталей;
- установка упругих деталей типа пружинных упорных колец на вал;
- установка уплотнительных резиновых армированных манжет с запрессовкой их в отверстие базовой детали ( корпус, крышка, стакан...).
В Перечне критических технологий Российской Федерации, в разделе "Приоритетное направление "Индустрия наносистем и материалы" представлена "Технологии мехатроники и создания микросистемной техники". В разделе "Важнейшие инновационные продукты (услуги), которые могут быть произведены с использованием технологий, входящих в состав соответствующих КТРФ" под п.45 представлены "Антропоморфные промышленные роботы грузоподъемностью 1,0-100кг различных технологических модификаций, под технологии и индивидуальные требования заказчиков, на основе ограниченного ряда унифицированных двухкоординатных мехатронных модулей".
Для реализации этого в 2005г организована новая некоммерческая структура, объединившая специалистов предприятий, которые раньше работали в области робототехники. Это объединение (оно уже начало функционировать) получило название:
"Ассоциация разработчиков и изготовителей промышленной робототехники".
Учредителями Ассоциации являются организации и предприятия, обладающие большим опытом конструирования и производства промышленной робототехники, проведения научно-исследовательских работ в этой области техники, подготовки соответствующих кадров и др. Среди них ЗАО "МНТК РОБОТ", ИПМех РАН, ИПМ им. М.В. Келдыша, ЗАО "МНПО Спектр", заводы ОАО "Красный пролетарий", ОАО "Станкоагрегат ", МИРЭА и другие, всего 14 организаций и предприятий.
Ассоциация планирует развернуть работы по реанимации отечественной робототехнической промышленности. Оценки показывают, что при благоприятных обстоятельствах и начале работы в 2006г в 2007г могут быть получены первые проекты опытных образцов промышленных роботов и далее будут сделаны первые образцы роботов.
В настоящее время осуществляется формирование работ Ассоциации по определению возможных мест применения этих роботов на московских и подмосковных предприятиях. При этом ожидается, что упомянутая экономическая целесообразность применения роботов в мелкосерийном производстве приведёт к значительному расширению использования роботов на средних предприятиях и соответствующему увеличению числа продаваемых недорогих роботов разных типов.
Таков план работы "Ассоциации разработчиков и изготовителей промышленной робототехники в ближайшие годы". Однако достаточно очевидно, что для реанимации производственных мощностей и организации разработки требуется значительная заинтересованность и финансовая поддержка государства.
- В.П. Степанов, И.Б. Кнауэр и др., "Робототехника в России", раздел 1,"Манипуляционные устройства промышленных роботов", стр. 12, Москва, 1992 г.
- Philippe Coiffet. New Role of Robotics in the Next Century. 30-th International Simposium on Robotics. Oct.27-29, 1999, Tokyo, Japan.
- B. Benhabib, V.Q. Dai. Mechanical Design of a Modular Robot for Industrial Applications. University of Toronto, Toronto, Canada. Journal of Manufacturing Sistems, Volume 10/No. 4, p. 297-306.
- В.П. Степанов, И.В. Калабин и др., Промышленный робот модульного типа, а.с. № 1734994, 22 января 1992 г.
- В.П. Степанов, "Новая концепция создания промышленных роботов" ж. "Интеграл" №2 2004гю сс.13-15.
- А.К.Платонов "Метод определения кинематических характеристик роботов" Сб. Программирование прикладных систем. М.Наука. 1992г. сс. 181-189.
- А.К.Платонов ""Умные" машины" ж."Наука в России" №2, 2005г. сс.29-32.